$ qemu-system-x86_64 -d ?
Log items (comma separated):
out_asm show generated host assembly code for each compiled TB
in_asm show target assembly code for each compiled TB
op show micro ops for each compiled TB
op_opt show micro ops after optimization
op_ind show micro ops before indirect lowering
int show interrupts/exceptions in short format
exec show trace before each executed TB (lots of logs)
cpu show CPU registers before entering a TB (lots of logs)
fpu include FPU registers in the 'cpu' logging
mmu log MMU-related activities
pcall x86 only: show protected mode far calls/returns/exceptions
cpu_reset show CPU state before CPU resets
unimp log unimplemented functionality
guest_errors log when the guest OS does something invalid (eg accessing a
non-existent register)
page dump pages at beginning of user mode emulation
nochain do not chain compiled TBs so that "exec" and "cpu" show
complete traces
plugin output from TCG plugins
strace log every user-mode syscall, its input, and its result
tid open a separate log file per thread; filename must contain '%d'
trace:PATTERN enable trace events
Use "-d trace:help" to get a list of trace events.
で、IRETというのは、RETurn from Interrtuptという命令で、割り込み処理を終了し、割り込みが起こった際に実行されていたコードの実行を再開するという命令です。
この命令はコンテキストスイッチでも利用されているので、まあ「マスク不可能な、おふとんへ今すぐ行け割り込み」が発生したら、熱中していたタスクから一旦コンテキストスイッチして、睡眠プロセスへ切り替えるというのが重要ですよ、という話をここでしています。
こっちは正常系の話で、suspend to diskの処理を表現しています。
よく、コンピューターにおけるメモリは、作業をするための机として例えられます。机が広ければよりたくさんのことを同時に効率よくできる、というアナロジーから来ているのでしょう。
さて、コンピューターがsuspendする際には、電力消費を抑えるために、メインメモリの内容をディスクなどの不揮発性の記憶装置に書き出します。(メモリが不揮発性とは限らないよ!NVDIMMがあるよ!と叫んでいる私のことは無視してください。)というのも、通常のコンピューターのメインメモリとして利用されているDRAMは、電荷をコンデンサにためるような感じでデータを保持しており、その電荷は時間経過で抜けてしまうため、定期的にデータを読み出して再度書き込むという操作(リフレッシュ)を行う必要があり、継続的に電力を消費するため、ここにデータを置いたままにしておくのは不都合だからです。
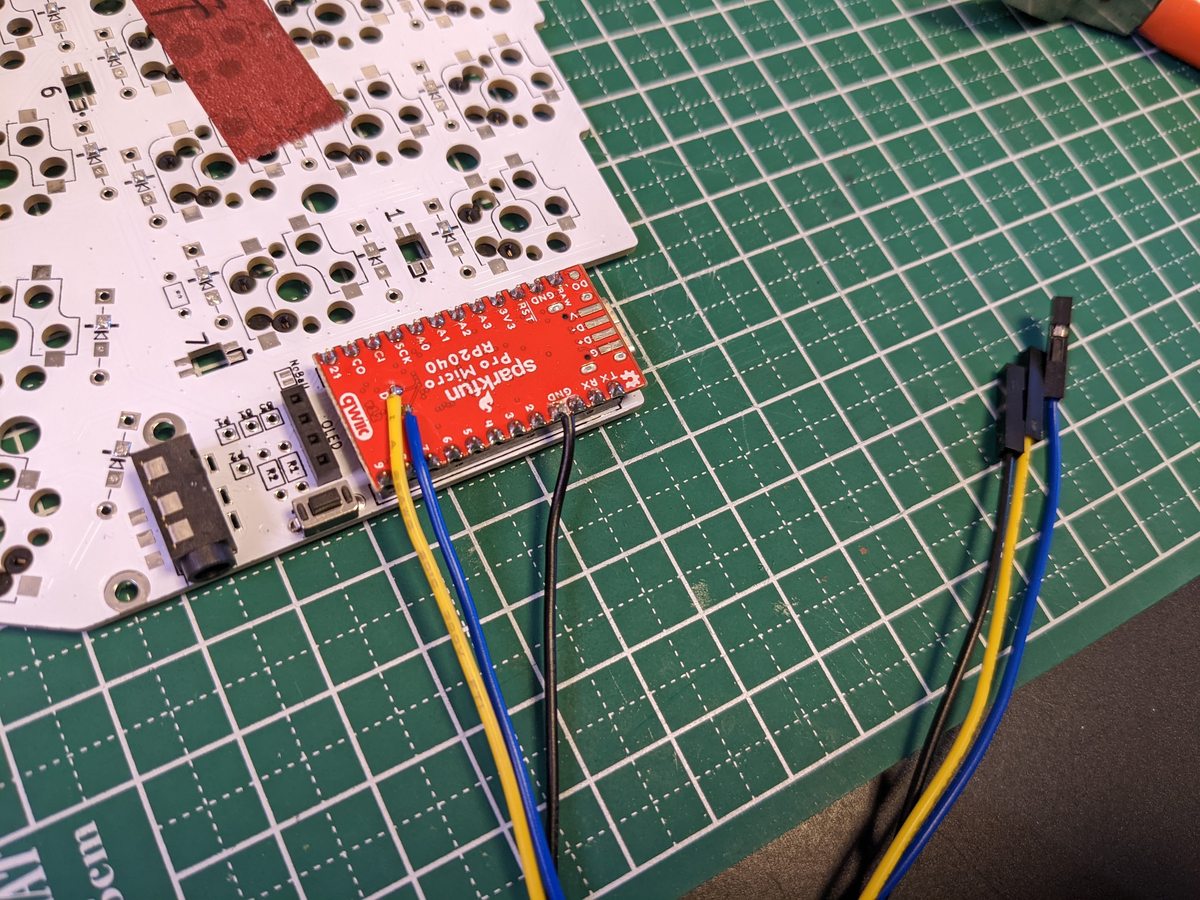
SWD Pins
For advanced users, there are two pins (i.e. D for data/SWDIO and C for clock/SWCLK) on the back broken out for SWD programming on the back of the board. You'll need to solder wire to connect to these pins.
// Create a USB device with a fake VID and PID
let usb_dev = UsbDeviceBuilder::new(bus_ref, UsbVidPid(0x16c0, 0x27da))
.manufacturer("Fake company")
.product("Twitchy Mousey")
.serial_number("TEST")
.device_class(0xEF) // misc
.build();
unsafe {
// Note (safety): This is safe as interrupts haven't been started yet
USB_DEVICE = Some(usb_dev);
}
fn push_mouse_movement(report: MouseReport) -> Result<usize, usb_device::UsbError> {
cortex_m::interrupt::free(|_| unsafe {
// Now interrupts are disabled, grab the global variable and, if
// available, send it a HID report
USB_HID.as_mut().map(|hid| hid.push_input(&report))
})
.unwrap()
}
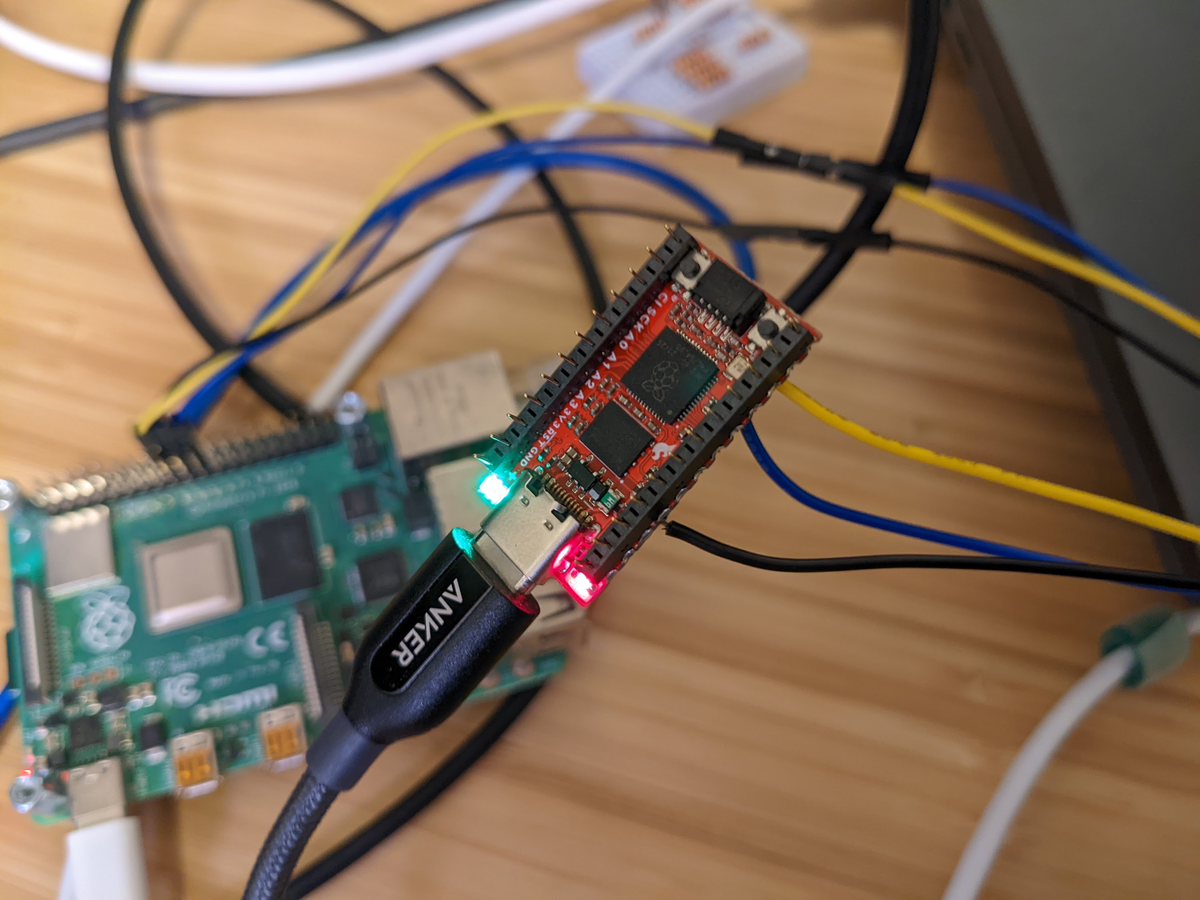
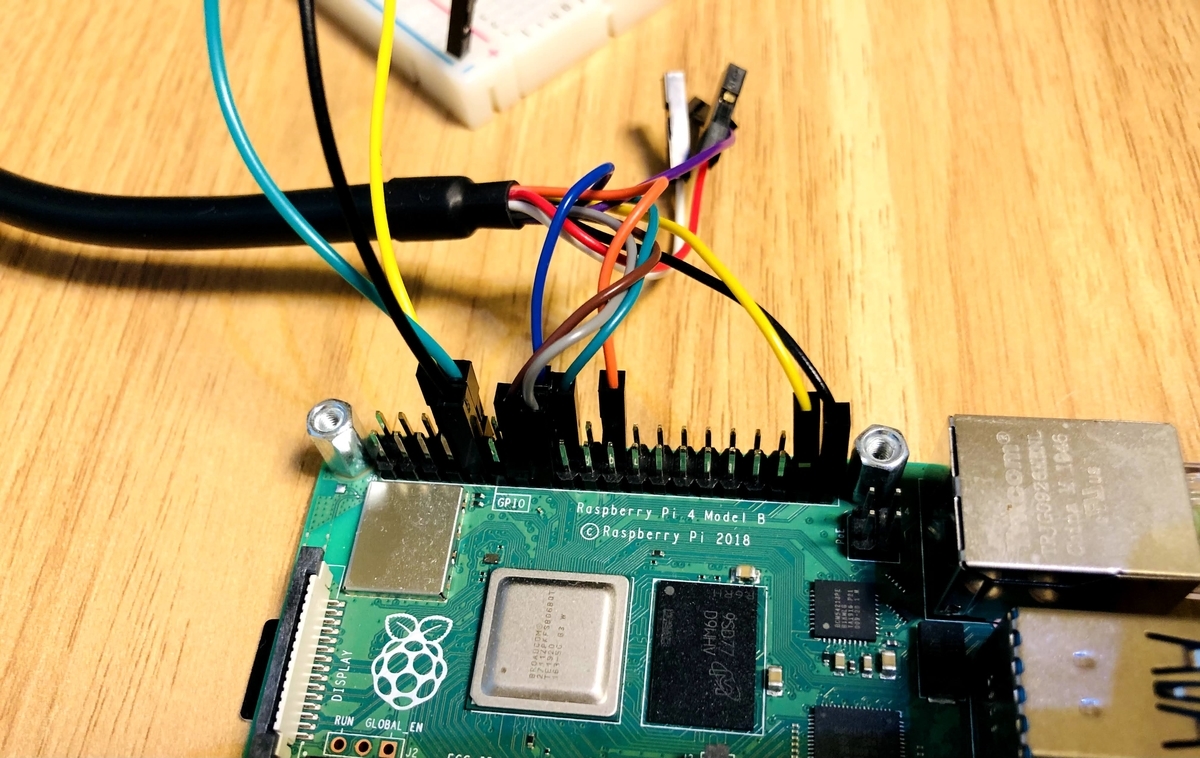
今回は、FTDI社製のケーブルを使用して、Raspberry Pi 4のJTAGにアクセスしてみました。前半部分はケーブル固有の話もあるので、他のJTAGケーブルをお持ちの方は、それぞれのマニュアルを参照して適宜読み替えていただく必要があります。一方後半部分は、openocdを使ってJTAG経由でRaspberry Pi 4の情報を取得する一般的な方法について説明しますので、みなさんの環境でも役立つかもしれません。参考にしていただければ幸いです。
$ brew install openocd --HEAD
...
==> Installing open-ocd --HEAD
==> ./bootstrap nosubmodule
==> ./configure --prefix=/usr/local/Cellar/open-ocd/HEAD-cff0e41 --enable-buspir
==> make install
Error: An unexpected error occurred during the `brew link` step
The formula built, but is not symlinked into /usr/local
Cannot link open-ocd
Another version is already linked: /usr/local/Cellar/open-ocd/0.10.0
Error: Cannot link open-ocd
Another version is already linked: /usr/local/Cellar/open-ocd/0.10.0
$ /usr/local/Cellar/open-ocd/HEAD-cff0e41/bin/openocd --version
Open On-Chip Debugger 0.11.0+dev-00236-gcff0e417d-dirty (2021-06-28-20:42)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
$ /usr/local/Cellar/open-ocd/HEAD-cff0e41/bin/openocd -f c232hm-edhsl-0.cfg -f raspi4.cfg
Open On-Chip Debugger 0.11.0+dev-00236-gcff0e417d-dirty (2021-06-28-20:42)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : clock speed 1000 kHz
Info : JTAG tap: auto0.tap tap/device found: 0x4ba00477 (mfg: 0x23b (ARM Ltd), part: 0xba00, ver: 0x4)
Info : bcm2711.a72.0: hardware has 6 breakpoints, 4 watchpoints
Info : bcm2711.a72.1: hardware has 6 breakpoints, 4 watchpoints
Info : bcm2711.a72.2: hardware has 6 breakpoints, 4 watchpoints
Info : bcm2711.a72.3: hardware has 6 breakpoints, 4 watchpoints
Info : starting gdb server for bcm2711.a72.0 on 3333
Info : Listening on port 3333 for gdb connections
> halt
bcm2711.a72.1 cluster 0 core 1 multi core
bcm2711.a72.2 cluster 0 core 2 multi core
bcm2711.a72.2 halted in AArch64 state due to debug-request, current mode: EL2H
cpsr: 0x000003c9 pc: 0x80
MMU: disabled, D-Cache: disabled, I-Cache: disabled
bcm2711.a72.3 cluster 0 core 3 multi core
bcm2711.a72.3 halted in AArch64 state due to debug-request, current mode: EL2H
cpsr: 0x000003c9 pc: 0x80
MMU: disabled, D-Cache: disabled, I-Cache: disabled
bcm2711.a72.0 cluster 0 core 0 multi core
bcm2711.a72.0 halted in AArch64 state due to debug-request, current mode: EL2H
cpsr: 0x600003c9 pc: 0x813d8
MMU: disabled, D-Cache: disabled, I-Cache: disabled
bcm2711.a72.1 halted in AArch64 state due to debug-request, current mode: EL2H
cpsr: 0x000003c9 pc: 0x80
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> targets
TargetName Type Endian TapName State
-- ------------------ ---------- ------ ------------------ ------------
0 bcm2711.a72.0 aarch64 little auto0.tap halted
1* bcm2711.a72.1 aarch64 little auto0.tap halted
2 bcm2711.a72.2 aarch64 little auto0.tap halted
3 bcm2711.a72.3 aarch64 little auto0.tap halted
(gdb) set architecture aarch64
The target architecture is assumed to be aarch64
(gdb) target extended-remote localhost:3333
Remote debugging using localhost:3333
warning: No executable has been specified and target does not support
determining executable automatically. Try using the "file" command.
0x00000000000813d8 in ?? ()
一方、Raspberry Pi OSは記事執筆現在は32bit(armv7l)で動作しているので、もしそのようなターゲットをデバッグしたい場合は、aarch64の代わりにarmv8-aにするとよいでしょう。
set architecture armv8-a
target extended-remote localhost:3333